

三维激光扫描采用非接触式高速激光测量方式,来获取地形或复杂物体的几何图形数据和影像数据,通过后处理软件对采集的点云数据和影像数据进行处理分析,转换成绝对坐标系中的三维空间位置坐标或者建立结构复杂,不规则场景的三维可视化模型,既省时又省力,同时点云还可输出多种不同的数据格式,做为空间数据库的数据源和满足不同应用的需要。三维激光扫描技术可以将现实场景1:1以点云形式呈现在计算机中,所以又被称之为实景复制技术。
三维激光扫描测量原理
- 脉冲式扫描测量原理
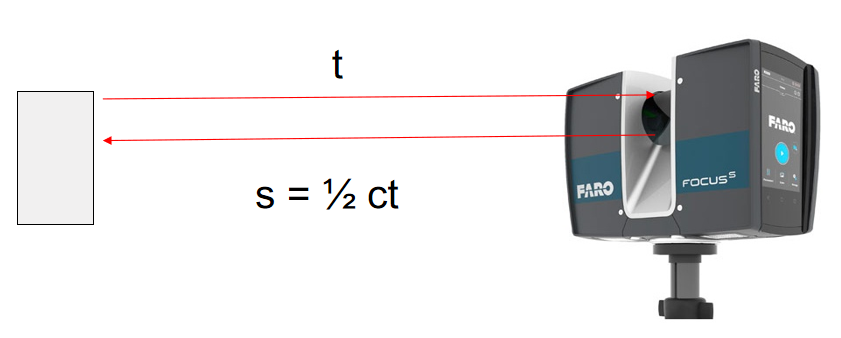
激光器发射脉冲信号脉冲信号到达物体表面,反射回来,扫描仪接收信号,直接测量飞行时间,在根据激光传播速度,计算出待测距离。 优点是扫描速度快、精度高,而缺点是扫描距离相对较近,通常是几十米至几百米。
- 相位式扫描测量原理
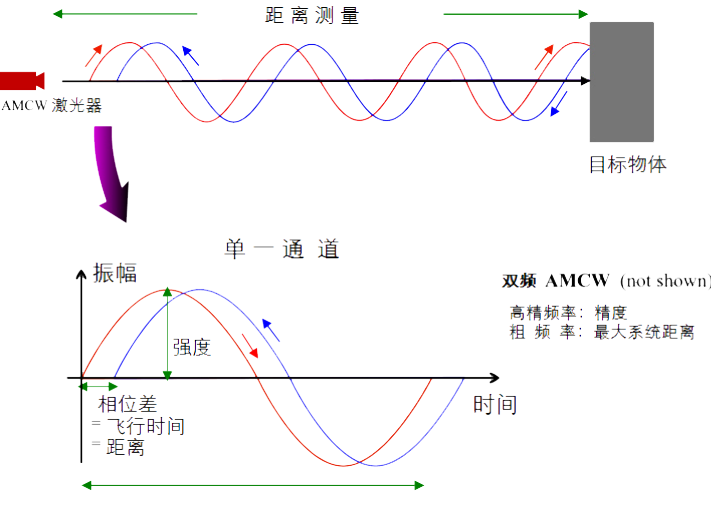
相位式激光测距是通过测量调制的激光信号在待测距离上往返传播所形成的相位差,间接测出激光传播时间,再根据激光传播速度,求出待测距离。 优点是扫描距离远,可以达到数公里,其缺点是扫描速度较慢。
三维激光扫描技术优势有:
速度快:三维扫描仪扫描速度能达到百万点/秒;
精度高:数据采集精度高,精度能达到±2mm;
直观性强:采集的点云数据,不仅仅有空间信息(X,Y,Z), 还具有颜色信息(R,G,B)以及反射率值( I ),给人一种场景再现的感觉;
适用性强:受外界影响较小,无光条件下亦可测量;
成果多样性:一次测量输出多种成果,无需反复测量;
非接触测量:远离危险区域,充分保障设备和操作人员的安全。
三维激光扫描技术应用领域:



评论